Système d’acquisition RTI agile et adaptative par bras robotisé
Financement : Projet de maturation SATT Sayens
Responsable : Alamin Mansouri
Membres participants : Matthieu Rossé, Amine Dhemaied, Ramamoorthy Luxman
Partenaires : SATT Sayens, Altimet
Contexte et objectifs : La technique d’imagerie RTI qui consiste à varier la direction d’éclairage tout en maintenant un point d’observation fixe (caméra) est une des modalités de capture de l’apparence les plus performantes. Cette technique a connu son essor dans des applications liées au domaine du patrimoine culturel mais ses applications commencent à s’étendre à d’autres domaines où l’apparence et sa modélisation sont de plus en plus recherchées (e.g industrie).
Actuellement, cette technique d’imagerie est implémentée selon deux principes :
- Free form, appelé aussi H-RTI où c’est un opérateur humain qui positionne manuellement la source de lumière
- à base de dôme qui peut être équipé de sources de lumière en nombre et positions fixes ou avec une seule source de lumière mobile.
La figure 1 illustre les deux exemples de systèmes d’acquisition RTI selon les deux principes précédents.

Du fait du positionnement manuel de la source de lumière, les acquisitions effectuées selon la méthode free-form ont l’avantage de pouvoir adapter la distance de la source de lumière, par rapport à l’objet observé, contrairement aux systèmes à base de dôme. Par contre, les d’acquisitions, fastidieuses, longues, manquent de précision et généralement impossible à reproduire. Quant aux acquisitions effectuées par dôme, le rayon du dôme n’est pas adaptable et sont appropriés pour des objets de tailles relativement petites et planes et ne s’adaptent aucunement à la nature de la surface observée notamment dans le cas de multiples sources au nombre et positions fixes.
Nous avons développé le premier système RTI à base d’un bras robotisé illustré sur la figure 2. où la source de lumière est positionnée grâce à un bras robotisé, ce qui permet de gagner en rapidité, en adaptabilité et reproductibilité des configurations. La proposition du système contient également une table motorisée, capable de bouger sur le plan (XY) perpendiculaire à l’axe de la caméra, sur laquelle peuvent être fixés le ou les objet(s) à acquérir.
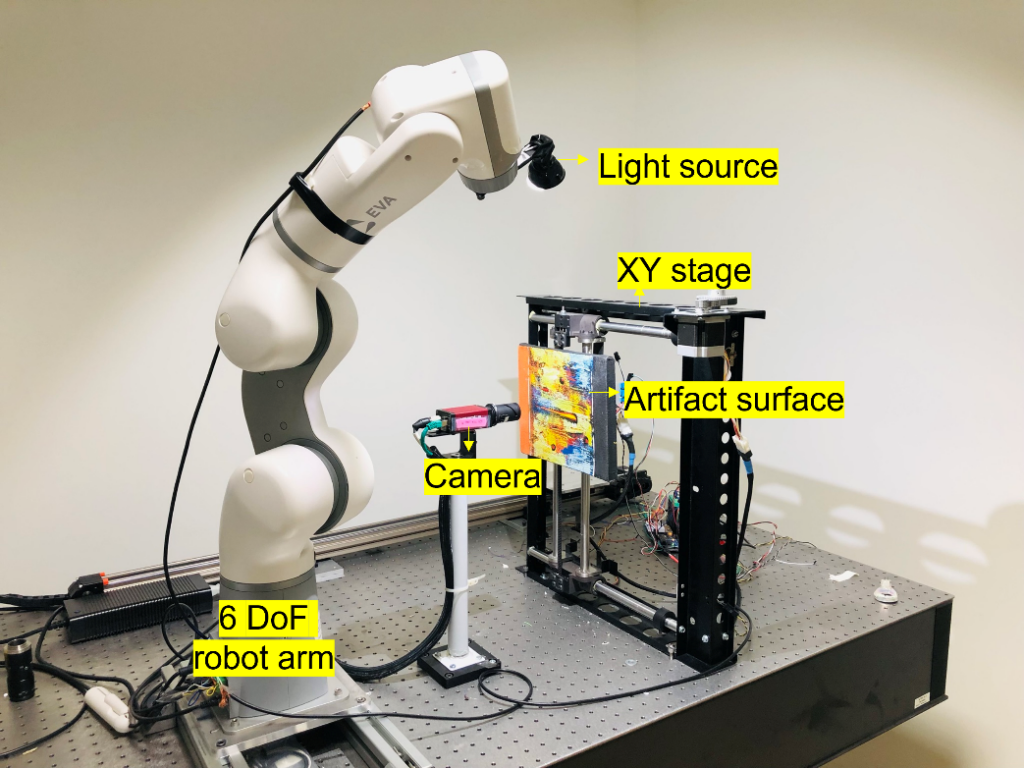
Ce système répond aux limitations identifiées et offre de nouvelles possibilités ; à savoir :
- Adaptation de la taille du dôme comme illustré sur la figure 3 (avantage par rapport à la modalité à base de dôme)
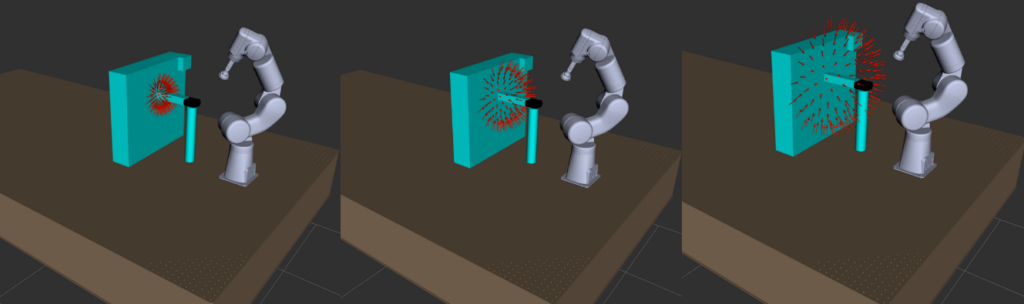
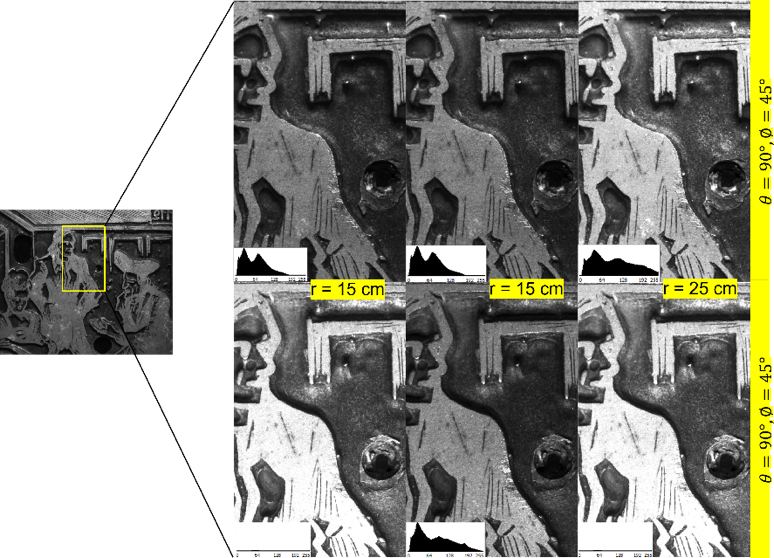
Figure 3. Illustration de l’adaptabilité du rayon de l’hémisphère à la taille de l’objet acquis. Première ligne : à gauche le rayon est de 15m ; au milieu le rayon est de 20cm et à droite le rayon est de 35cm. Deuxième ligne : exemples d’acquisitions et ré-éclairage en variant le rayon
- Acquisitions de lots (batch acquisition) dans les mêmes conditions comme illustré sur la Figure 3 (avantage par rapport aux deux modalités)
- Acquisitions partielles d’une grande surface et reconstruction panoramique
- Réduction du temps d’acquisition grâce à l’automatisation et l’acquisition de lots
- Reproductibilité, notamment comparé à la méthode free-form
- Adaptation à des formes complexes
- Adaptation à la topographie de la surface observée (NBLP)
- La commande à distance grâce à une interface de pilotage web